


 功能介绍
功能介绍






1、预测项目潜在投标单位,提前了解潜在投标单位的项目竞争力;
2、分析招标单位同类项目成交价格、规模趋势,让投标报价更加科学精准;
3、分析招标单位同类项目历史合作方,快速了解您的竞争对手;
4、洞悉同类项目主要供应商市场占有量,全面掌握市场最新最新动态。
说明:支付即代表同意《比地招标网线上购买与服务条款》 如有疑问请联系客服:400-999-4928
温馨提示:支付成功后,可联系客服开具发票哦~
温馨提示:支付成功后,可联系客服开具发票哦~

恭喜您,下载成功!
数据将在5分钟内发送至您的邮箱
,请注意查收!
如需开具发票请联系客服:400-999-4928
创建订单中...


企业分析报告是什么?
企业报告是通过海量招标采购项目信息和企业主体信息,多维度分析企业招投标市场规模、业务分布、关联主体、违规失信风险情况的实时企业大数据报告。
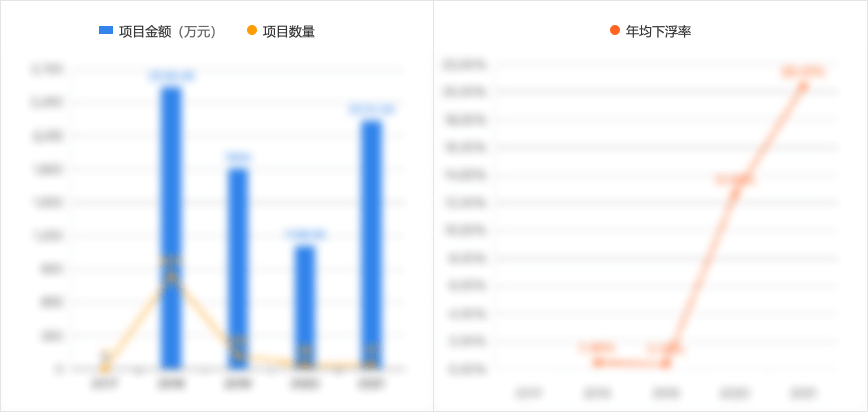
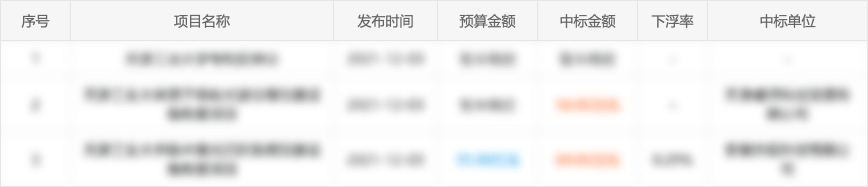
1、帮助您分析招标单位的项目规模趋势和预算节约率,为企业开发客户、投标报价提供参考,让投标更有针对性;
2、帮助您分析招标单位的采购行业品类,帮助企业拓宽相关业务;
3、帮助您分析招标单位的主要合作供应商和合作代理机构,帮助企业了解同行竞争实力水平,结合供应商报告定位自身企业优劣势,找到更多商机;
4、帮助您分析招标单位的违规失信风险,提高自身风险防范能力。
1、帮助您分析同行或者自身的中标金额趋势、项目规模和报价下浮率,为企业投标、报价提供参考,让投标决策更合理;
2、帮助您分析企业的招投标区域优劣势,扬长避短赢得更多市场机会;
3、帮助您分析企业的主要竞争对手、主要合作业主,从竞争对手、合作业主的优劣势比较中,找到自身企业优势和合作商机;
4、帮助您分析企业最新的信用风险记录,为企业投诉,维护自身合法竞争权益提供参考线索。
1、帮助您了解代理机构项目概况、业主发展趋势、项目结构等基本情况,为招投标市场拓展提供参考;
2、帮助您了解代理机构的项目分布情况(包括采购系统和地区),分析目标企业的市场占比,寻找更多市场机会;
3、帮助您了解代理机构所代理的项目预算节约度,从而分析与目标企业的服务差距,优化自身服务能力;
4、帮助您了解代理机构的重点客户情况,帮助企业了解同行的合作情况,提高自身竞争力;
5、帮助您了解代理机构的各项经营风险,防范自身信用风险,提高风险防范能力。
1、帮助您分析招标单位的项目规模趋势和预算节约率,为企业开发客户、投标报价提供参考,让投标更有针对性;
2、帮助您分析招标单位的采购行业品类,帮助企业拓宽相关业务;
3、帮助您分析招标单位的主要合作供应商和合作代理机构,帮助企业了解同行竞争实力水平,结合供应商报告定位自身企业优劣势,找到更多商机;
4、帮助您分析招标单位的违规失信风险,提高自身风险防范能力。
1、帮助您分析同行或者自身的中标金额趋势、项目规模和报价下浮率,为企业投标、报价提供参考,让投标决策更合理;
2、帮助您分析企业的招投标区域优劣势,扬长避短赢得更多市场机会;
3、帮助您分析企业的主要竞争对手、主要合作业主,从竞争对手、合作业主的优劣势比较中,找到自身企业优势和合作商机;
4、帮助您分析企业最新的信用风险记录,为企业投诉,维护自身合法竞争权益提供参考线索。
1、帮助您了解代理机构项目概况、业主发展趋势、项目结构等基本情况,为招投标市场拓展提供参考;
2、帮助您了解代理机构的项目分布情况(包括采购系统和地区),分析目标企业的市场占比,寻找更多市场机会;
3、帮助您了解代理机构所代理的项目预算节约度,从而分析与目标企业的服务差距,优化自身服务能力;
4、帮助您了解代理机构的重点客户情况,帮助企业了解同行的合作情况,提高自身竞争力;
5、帮助您了解代理机构的各项经营风险,防范自身信用风险,提高风险防范能力。

- 近一年
- 近两年
- 近三年
说明:支付即代表同意《比地招标网线上购买与服务条款》 如有疑问请联系客服:400-999-4928
温馨提示:支付成功后,可联系客服开具发票哦~
温馨提示:支付成功后,可联系客服开具发票哦~
恭喜您,下载成功!
数据将在5分钟内发送至您的邮箱
,请注意查收!
创建订单中...
 换一批
换一批








 潜在投标单位
潜在投标单位











 放大
放大 缩小
缩小

 公告内容:
公告内容:
项目概况
***波荡器研制招标项目的潜在投标人应在****省绵阳市游仙区科学城中物院物资部获取招标文件,并于****年**月**日**:** (北京时间)前递交投标文件。
*、项目基本情况:
*.项目编号:**************
*.项目名称:***波荡器研制
*.采购方式:****
*.预算金额:*,***,***.**元(人民币)
*.最高限价:*,***,***.**元(人民币)
*.采购需求:
采购需求*览表
| 序号 |
包件号 |
包件名称 |
产品名称 |
数量 |
采购预算 |
最高限价 |
交货地点 |
简要技术要求 |
| * |
* |
***波荡器研制 |
***波荡器研制 |
*套 |
*,***,***.**元 |
*,***,***.**元 |
****省****市****区采购人指定地点 |
***周期长度****,周期** |
注:投标必须以包件为单位,对所投包件号中的所有内容进行投标,不允许将包件拆开投标,也不允许将几个包件合并报*个价格投标。评标、授标以包件为单位。
*.合同履行期限:****年*月**日前完成
*.本项目不接受联合体投标。
*、申请人的资格要求:
*.基本资格要求:
*.*具有独立承担民事责任的能力;
*.*具有良好的商业信誉和健全的财务会计制度;
*.*具有履行合同所必需的设备和专业技术能力;
*.*有依法缴纳税收和社会保障资金的良好记录;
*.*参加本次采购活动前*年内,在经营活动中没有重大违法记录;
*.*法律、行政法规规定的其他条件。
*. 落实采购政策需满足的资格要求:
无
*. 本项目的特定资格要求:
*.*截止至投标截止日,投标人未被列入失信被执行人、重大税收违法案件当事人名单、****严重违法失信行为记录名单(处罚期限尚未届满的)(以“信用中国”网站(***.***********.***.**),“中国****网”网站(***.****.***.**)采购人或采购代理机构在开标后至评标结束前的查询记录为准);
*.*不属于为采购项目提供整体设计、规范编制或者项目管理、监理、检测等服务的供应商再参加该采购项目的其他采购活动;
*.*不属于单位负责人为同*人或者存在直接控股、管理关系的不同供应商同时参加同*合同项下的采购活动;
*.*其他特定资格要求:
无。
*、获取招标文件
*.时间:****年**月**日 至****年**月**日 ,每天上午 *:**-下午*:**(北京时间,法定节假日除外),联系工作人员获取招标文件。
*.地点:****省绵阳市游仙区科学城中物院物资部。
*.方式:电子邮件。获取招标文件时,供应商需向联系人提供“供应商获取采购文件登记表”(采购公告中自行下载)。
联系人:****
联系电话:****-******* 电子邮箱:***********@**.***
*.售价:免费提供。
*.获取招标文件时,供应商需将填写完整的“供应商获取采购文件登记表”向联系人提供,以上资料无误后,物资部工作人员*个工作日内向供应商提供招标文件。
*、提交投标文件截止时间、开标时间和地点
提交投标文件截止时间和开标时间:****年**月**日 **:**(北京时间)。
提交投标文件和开标地点:中物院集中交易场所开标室(绵阳市游仙区科学城*区旁老动力部院内电修大楼)。
*、公告期限
自本公告发布之日起*个工作日。
*、其他补充事宜:
*.本项目需要参加现场投标。涉外人员未经允许,不得参加现场投标。
*.投标文件提交:投标文件必须在投标截止时间前按要求送达开标地点。本次招标不接受邮寄的投标文件。
有以下情形之*的,投标文件不予接收:
(*)未通过****获取招标文件的;
(*)投标截止时间以后送达投标文件的;
(*)投标文件未按要求密封的。
*.评标方法:综合评分法。
*.本项目招标公告内容以****(****://*****.****.**.**)发布的公告为准。
*.本项目需落实的采购政策:
(*)执行节能产品优先采购和强制采购政策;
(*)执行环境标志产品优先采购政策;
(*)执行促进中小企业发展采购政策;
(*)执行支持监狱企业发展采购政策;
(*)执行促进残疾人就业政策;
(*)执行优先采购无线局域网认证产品政策;
(*)扶持不发达地区和少数民族地区。
*.是否专门面向中小企业或小型、微型企业采购:否。
*.本项目为货物类标的,所属行业为:工业(包括采矿业,制造业,电力、热力、燃气及水生产和供应业)
*.是否允许进口产品投标:否。
*、对本次招标提出询问,请按以下方式联系。
*.采购人信息
名 称:****
地 址:****省绵阳市绵山路**号
联 系 人: ****
联系方式:****-*******
*.采购代理机构信息
名 称:****
地 址:****省绵阳市游仙区科学城中物院物资部
联系方式:****-*******
*.项目联系方式
项目联系人:****
电 话:****-*******
电子邮箱:***********@**.***
附件:***波荡器研制采购项目采购需求.*** 附件:附件-采购文件获取登记表.***
招标文件有更新,请各潜在投标人登录系统重新下载招标文件!
 您当前为:项目公告
您当前为:项目公告












 招标采购
招标采购
 询价订单
询价订单
 分包项目
分包项目
 直采订单
直采订单
 拟在建项目
拟在建项目
 业主委托
业主委托
